Curiosity performed a flawless landing at Mars on schedule, at 1:31 a.m. EDT on Monday Aug. 6th 2012 EDT! The landing site of the Rover was called Bradbury Landing after the famed novelist. With new software installed Aug. 10 through Aug. 13, the rover transitioned from landing to operations as it begun driving from its landing site. The rover will now spend several more days of working beside landing site, performing instrument checks, calibrations and studying the surroundings, before embarking toward its first driving destination approximately 1,300 feet (400 meters) to the east-southeast. The first measurements of the neighbourhood composition hint to a basaltic one
Curiosity landing occurred at about 3 p.m. local time as the distance from Earth to Mars was 352 million miles (567 million kilometers) and the temperature minus 130 F to 32 F (minus 90 C to zero C). Due to a new landing technique, the flight engineers were able to shrink the landing ellipse to about 4 by 12 miles (7 by 20 kilometers) and moving the center target closer to Mount Sharp instead of a initial 12 x 16 miles (20 x 25 km) already much smaller than the landing target area for any previous Mars mission. That was also abled by elevation data from the High Resolution Stereo Camera on ESA Mars Express, image data from the Context Camera on NASA's Mars Reconnaissance Orbiter, and colour information from the old Viking Orbiter imagery. All that allowed a landing on the moat of flatter ground between the mountain and the crater rim. The craft had performed a 36-week flight from Earth as it had been hit by five major flares and solar particle events in the Earth-Mars expanse. Another premiere of the mission was that a camera aboard the descending set was able to record the spectacular descent of the craft from the moment it jettisoned its lower heat shield as one of NASA's orbiter was also able to image the craft descending under its parachute. Both that video and image gave a unprecedented sense of how a planetary mission is landing unto a faraway world -and maybe the one of what next manned mission to Mars could look like! A suite of sensors, or MSL Entry Descent and Landing Instrumentation (MEDLI), during the descent inside the heat shield was to collect valuable data
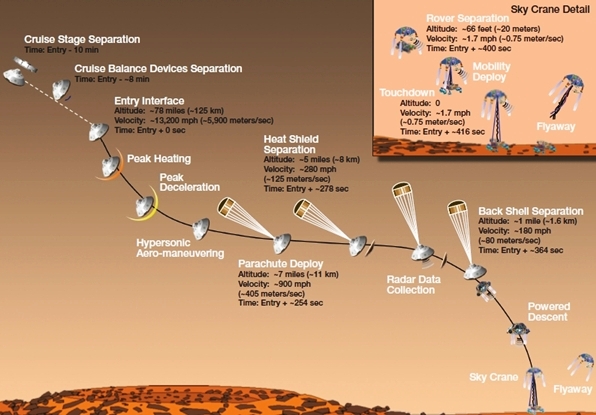
| A view of the MSL descent timeline (exact timing of the events on the diagram was to be determined by atmospheric conditions on landing day)!. courtesy site 'Amateur Astronomy' |
During cruise and approach phases, the spacecraft was spin-stabilized at about two rotations per minute. The final 45 days leading up to the Mars landing were the approach phase, preceding the entry, descent and landing (EDL) phase of the mission. That began when the spacecraft reached the top of the Martian atmosphere, traveling at about 13,200 miles per hour (21,200 km/h). EDL was scheduled to end about seven minutes later with the rover stationary on the surface. From just before jettison of the cruise stage, 10 minutes before entry, to the cutting of the sky crane bridle, the spacecraft went through six different vehicle configurations and fires 76 pyrotechnic devices, such as releases for parts to be separated or deployed. The atmospheric entry interface point — the navigators’ aim point during the flight to Mars — was set at 81.46 miles (131.1 kilometers) above the ground elevation of the landing site at Gale Crater. While descending from that altitude to the surface, the spacecraft did travel eastward relative to the Mars surface, covering a ground-track distance of about 390 miles (about 630 kilometers) between the atmospheric entry point and the touchdown target. Ten minutes before the spacecraft entered the atmosphere, it shed the cruise stage. The Mars Science Laboratory Entry, Descent and Landing Instrument (MEDLI) Suite began taking measurements. A minute after cruise stage separation, nine minutes before entry, small thrusters on the back shell halted the two-rotation-per-minute spin that the spacecraft maintained during cruise and approach phases and then, the same thrusters on the back shell oriented the spacecraft so the heat shield faced forward, a maneuver called 'turn to entry.' After the turn to entry, the back shell jettisoned two solid- tungsten weights, or the 'cruise balance mass devices' to shift the center of mass of the spacecraft and giving it the ability to generate lift, essentially allowing it to fly through the atmosphere which was required to land a heavier robot. The spacecraft also automatically manipulated that lift, using a technique called 'guided entry,' through small thrusters on the back shell to steer out unpredictable variations in the density of the Mars atmosphere, improving the precision of landing on target, and even performing 'S turns' or bank reversals. More than nine-tenths of the deceleration before landing resulted from friction with the Mars atmosphere and peak heating occured about 75 seconds after atmospheric entry, at 3,800 degrees Fahrenheit (about 2,100 degrees Celsius) as deceleration was to like in a peak range of 10 g to 11 g
After another adjustment of the center of mass through tungsten weights to re-balance the spacecraft for the parachute portion of the descent, the 51-foot (16-meter) parachute deployed about 254 seconds after entry, at an altitude of about 7 miles (11 kilometers) and a velocity of about 900 miles per hour (about 405 meters per second). 24 more seconds after parachute deployment, the heat shield separated when at a altitude of about 5 miles (about 8 kilometers) and a velocity of about 280 miles per hour (125 meters per second). Since that moment, the Mars Descent Imager began recording video, looking in the direction the spacecraft is flying continuously through the landing. About 85 seconds after heat shield separation the back shell, with parachute attached, separated from the descent stage and rover or at 1 mile (1.6 kilometers) above the ground and a speed 180 miles per hour (about 290 km/h). All eight throttleable retrorockets on the descent stage, or the 'Mars landing engines,' began firing for the powered descent phase, deccelarating the descent to 1.7 miles per hour (2.7 km/h) until rover touchdown. Four of the eight engines shut off just before nylon cords began to lower the rover from the descent stage in the 'sky crane' maneuver at an altitude of about 66 feet (about 20 meters), and 12 seconds to go before touchdown. The rover since then separated from its hard attachment to the descent stage, though still attached by the sky crane bridle! Rover’s wheels popped into place just before touchdown as the bridle is fully spooled out as the spacecraft continues to descend with touchdown occurring at the descent speed of about 1.7 miles per hour (2.7 km/h). When the spacecraft sensing touchdown, connecting cords were severed and the descent stage flew out of the way, coming to the surface by about 1,000 feet (300 meters) from the rover’s position. The rover’s computer then switched from entry, descent and landing mode to 'surface mode' initiating autonomous activities for the first Martian day on the surface of Mars
As far as communications during the descent are concerned, data transmission from the landing were to he hampered as Earth was to set below the Martian horizon from the descending spacecraft's perspective. NASA's Mars Odyssey was to help a indirect communication process. NASA's Mars Reconnaissance Orbiter (MRO) and the European Space Agency's Mars Express, were also in position to receive radio transmissions from MSL during its descent, recording information for later playback. As the rover descended to the surface of Mars, it sent out two different types of data: basic radio-frequency tones that went directly to Earth and more complex UHF radio data that require deferred relaying by orbiters, Odyssey for the UHF signal and MRO for the data respectively
Website Manager: G. Guichard, site 'Amateur Astronomy,' http://stars5.6te.net. Page Editor: G. Guichard. last edited: 8/28/2012. contact us at ggwebsites@outlook.com