| click to larger farewell images views in the form of a animated gif of the lander seen separating from the Rosetta orbiter. picture ESA |
As the landing date was to be confirmed on 26 September after further trajectory analysis and the final Go/No Go for a landing at the primary site following a comprehensive readiness review on 14 October, the landing operations began since Nov. 11, 2014. After a series of Go/No go decisions were made, the Rosetta probe was eventually moved to a point about 14 miles above the comet's surface, and separation was confirmed at ESA’s Space Operation Centre, ESOC, in Darmstadt, Germany at 09:03 GMT as it took the radio signals from Rosetta 28 minutes and 20 seconds to reach Earth. Thence, Philae kept descending without propulsion or guidance, gradually gathering speed in the comet's weak gravitational field during about 7 hours, and eventually reaching a speed of 3 ft per second only. Commands prepared by the German space agency DLR's Lander Control Center had been uploaded via the Rosetta mission control before separation. During the descent, the lander was to take pictures and make science, and it was to begin communications with Rosetta about two hours after separation. All that occurred by 311 million miles from the Earth. By November 2014, the 'Site J' landing site had been renamed for Agilkia Island, a island on the Nile River in the south of Egypt where the Temple of Isis from the island of Philae when the latter was flooded during the building of the Aswan dams
Some troubles hampered the landing of the Philea lander however. First, the cold gas thruster atop of the lander did not appear to be working so the landing had to rely on the lander's harpoons only at touchdown. Those harpoons in turn were not available at landing, which made that the lander bounced off the landing site by 1 kilometer (300 ft), despite touchdown occurred at a walking pace (which is due to the comet's weak gravity with the lander weighing 1 gram only instead of 50 lbs!), and it eventually landed on a inclined terrain, close to a boulder, and in shadow. The lander after landing thus is just anchored with the comet through two of its three ice screws only. With a inclination of 13° and 1 hour and 30 mn of solar light available instead of 12, the lander is hampered in his science but that kept up however. Philae’s Science, Operations and Navigation Centre is at France's CNES space agency, and the Lander Control Centre at DLR, the German space agency
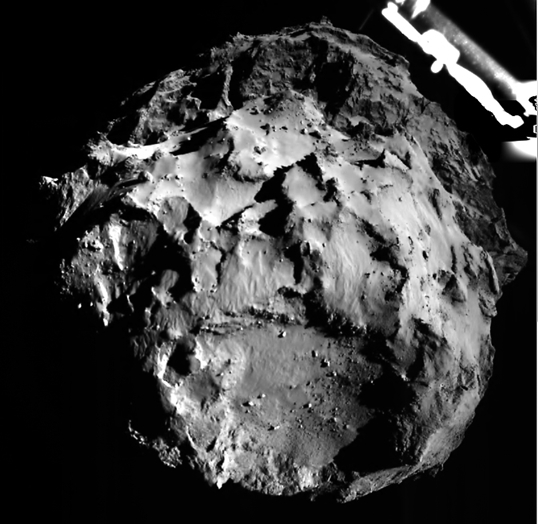
| click to a view of the comet's surface closing as seen by the Philae lander's ROLIS instrument. picture ESA |
| click to a two-image mosaic of the neighbourhood of where the lander touchdowned. One of the lander’s three feet can be seen in the foreground. picture ESA |
Confirmation of Philae’s touchdown on the surface of comet 67P/Churyumov–Gerasimenko had arrived on Earth at 16:03 GMT on Nov. 12, 2014. A first touchdown and its signal however occurred as the lander bounced off downrange the planned landing ellipse. Philae touched down again then two hours after as third contact was the charm. The lander however alighted in a crevice about six feet (two meters) in diameter and six feet (two meters) deep and it lied on its side. Despite is landing site position, the Philae lander has completed its planned primary science mission, of which a drill into the soil, after nearly 57 hours on comet 67P/Churyumov–Gerasimenko, performing on its own batteries. The Philae probe has detected organic molecules in the atmosphere of comet 67P/Churyumov-Gerasimenko. The lander’s body was lifted by about 4 cm (less than 2 inches) and rotated about 35° in an attempt to receive more solar energy but Philae’s power rapidly depleted. Descent images show that the surface of the comet is covered by dust and debris ranging from a line in size to 3 feet while post-landing panoramic images show layered walls of harder-looking material. As the illumination at the site is unsufficient to provide more power, the Philae team decided to put the lander into hibernation as they hope they might be able to wake it up when closer to the Sun with enough solar power. The Rosetta orbiter will listen for a signal each time its orbit brings it into line-of-sight visibility with the lander as it is unlikely that contact will be re-established with the lander in the near future. The lander could be woken up on 26 April 2015, but had been unable to send any signals until 13 June. After 13 June, it made a further seven intermittent contacts with Rosetta in the following weeks, with the last coming on 9 July. That awakening is due to that the comet came closer to Sun on its orbits, yielding more power to the landing's solar panels. However, such communications links were too short and unstable to enable any scientific measurements to be commanded. The Philae lander however had managed to complete 80 percent of its planned first science sequence before falling into hibernation. Philae's mission was considered decommissioned by ESA by late Dec. 2015
(this timeline is a one given by ESA; all times subject to change. check abbreviations below)
| Date |
UTC on Earth |
CET on Earth |
Event |
| 11/11 | 01:48:49 | 02:48:49 | BOT ESA New Norcia (NNO) |
| 11/11 | 03:10:00 | 04:10:00 | BOT NASA DSN Canberra |
| 11/11 | 12:25:00 | 13:25:00 | EOT Canberra |
| 11/11 | 13:40:00 | 14:40:00 | BOT DSN Madrid |
| 11/11 | 13:58:05 | 14:58:05 | BOT ESA Malargüe (MLG) |
| 11/11 | 14:00:00 | 15:00:00 | Flight Dynamics Team at ESOC begin orbit determination procedure to accurately fix Rosetta's precise trajectory |
| 11/11 | 14:30:17 | 15:30:17 | EOT ESA NNO |
| 11/11 | 18:33:20 | 19:33:20 | Lander switch-on. Includes switching on Electrical Support System, which controls orbiter communication interface with the lander |
| 11/11 | 19:05:20 | 20:05:20 | Lander batteries and compartment heating ADS Tank (Active Descent System - provides cold gas thrust upwards to avoid rebound upon landing) opening |
| 11/11 | 19:25:20 | 20:25:20 | Lander Primary Battery conditioning start; about 28 mins |
| 11/11 | 19:00:00 | 20:00:00 | EOT DSN Madrid |
| 11/11 | 19:30:00 | 20:30:00 | GO/NOGO1 - Last full orbit determination; ESOC Flight Dynamics confirms Rosetta trajectory is correct |
| 11/11 | 20:03:00 | 21:03:00 | Rosetta starts slew to pre-delivery manoeuvre attitude (expected loss of signal) |
| 11/11 | 20:20:00 | 21:20:00 | BOT DSN Goldstone |
| 11/11 | 20:43:00 | 21:43:00 | End of Rosetta slew |
| 11/11 | 20:52:20 | 21:52:20 | Start Lander flywheel operation - provides stability during descent |
| 11/11 | 23:25:00 | 00:25:00 | BOT DSN Goldstone |
| 11/11 | 23:40:00 | 00:40:00 | BOT DSN Canberra |
| 12/11 | 00:00:00 | 01:00:00 | EOT DSN Goldstone |
| 12/11 | 00:00:00 | 01:00:00 | GO/NOGO 2(a) - Confirm telecommands to control
delivery sequence are ready GO/NOGO 2(b) - ESOC confirms Rosetta is ready |
| 12/11 | 01:00:00 | 02:00:00 | ESOC uploads commands to control spacecraft for Lander delivery operations |
| 12/11 | 01:03:20 | 02:03:20 | Lander generates final telemetry (TM) on-board prior to GO/NOGO for SEP decision |
| 12/11 | 01:35:00 | 02:35:00 | (EXPECTED AT 02:35 UTC / 03:35 CET) GO/NOGO 3 - Confirm Philae is ready for landing |
| 12/11 | 01:46:10 | 02:46:10 | BOT ESA New Norcia |
| 12/11 | 03:02:50 | 04:02:50 | EOT ESA Malargüe |
| 12/11 | 04:03:20 | 05:03:20 | Lander - start of Separation, Descent & Landing (SDL)
activities Start switching Lander instruments ON; ROMAP first |
| 12/11 | 04:28:20 | 05:28:20 | Rosetta - Start executing on-board commands for delivery operations |
| 12/11 | 04:34:20 | 05:34:20 | Start heating Lander batteries to separation temperature |
| 12/11 | 06:03:20 | 07:03:20 | Rosetta - Earliest start pre-delivery manoeuvre (thruster
burn) Burn will be followed by loss of signal due to subsequent slew for separation Manoeuvre expected to be about 0.46m/s & about 6 mins duration |
| Date |
UTC on Earth |
CET on Earth |
Event | 12/11 | 06:35:00 | 07:35:00 | Earliest GO/NOGO 4 - final decision to go for landing |
| 12/11 | 07:03:20 | 08:03:20 | Rosetta - Latest start pre-delivery manoeuvre |
| 12/11 | 07:35:00 | 08:35:00 | Latest GO/NOGO 4 - final decision to go for landing |
| - | - | Following MVR, ESOC Flight Dynamics Team conducts rapid assessment of MVR performance to verify burn results | |
| 12/11 | 07:49:20 | 08:49:20 | Lander - Switch on MUPUS |
| 12/11 | 07:52:20 | 08:52:20 | Start MUPUS operation and switch-on CivaRolis ÇIVA and ROLIS are imaging systems; ÇIVA makes panoramic images, ROLIS looks down |
| 12/11 | 07:55:20 | 08:55:20 | Start CivaRolis operation and switch-on SESAME (dust sensor) |
| 12/11 | 08:04:20 | 09:04:20 | Start SESAME operation |
| 12/11 | 08:46:20 | 09:46:20 | Start MSS (Mechanical Support System), which executes the mechanical separation from the Orbiter |
| 12/11 | 08:46:20 | 09:46:20 | Separation Motors ON |
| 12/11 | 08:49:20 | 09:49:20 | Start CONSERT Orbiter operation |
| 12/11 | 08:50:20 | 09:50:20 | Start CONSERT Lander operation |
| 12/11 | 08:51:20 | 09:51:20 | Start MSS sequence - internal autosequence to prepare for landing |
| 12/11 | 08:53:20 | 09:53:20 | Lander now on internal battery power |
| 12/11 | - | - | Screws in Separation Motors start to rotate and impart deployment speed to push Lander away, retrograde .21 m/s |
| 12/11 | 09:03:20 | 10:03:20 | PHILAE SEPARATION (Forecast; 94-sec window) Separation confirmation received on ground via ESA's NNO New Norcia station |
| 12/11 | 09:04:12 | 10:04:12 | Lander (ÇIVA) obtains first images of Orbiter (FAREWELL1) |
| 12/11 | 09:06:17 | 10:06:17 | Lander (ÇIVA) obtains seconds images of Orbiter (FAREWELL2) |
| 12/11 | 09:12:17 | 10:12:17 | Lander / Orbiter separation distance now ~100m Earliest autodeployment of landing gear and ROMAP boom antenna |
| 12/11 | 09:25:50 | 10:25:50 | Lander starts rotation of 14 degrees to stable landing orientation |
| 12/11 | 09:43:20 | 10:43:20 | Rosetta performs post-delivery manoeuvre Burn will be followed by loss of signal due to subsequent slew back to nominal pointing Manoeuvre magnitude to be determined on 12/11 |
| 12/11 | 09:47:17 | 10:47:17 | Lander completes all post-separation activities |
| 12/11 | 10:53:20 | 11:53:20 | Acquisition of signal (AOS) from Rosetta Expected AOS; link with Rosetta now re-established |
| 12/11 | 11:59:20 | 12:59:20 | Start of stored data downlink from Rosetta & Philae |
| 12/11 | 12:20:00 | 13:20:00 | EOT DSN Canberra |
| 12/11 | 13:15:00 | 14:15:00 | BOT DSN Madrid |
| 12/11 | 13:55:00 | 14:55:00 | BOT ESA MLG |
| 12/11 | 14:27:00 | 15:27:00 | EOT NNO |
| 12/11 | 14:58:57 | 15:58:57 | Lander - switch-on Anchor & CivaRolis |
| Date |
UTC on Earth |
CET on Earth |
Event | 12/11 | 15:01:57 | 16:01:57 | Lander - start imaging landing site and switch on ADS (Active Descent System) |
| 12/11 | 15:07:02 | 16:07:02 | ROLIS begins imaging |
| 12/11 | 15:17:15 | 16:17:15 | On board Lander, systems conduct final pre-touch-down operations |
| 12/11 | 15:22:20 | 16:22:20 | Start of Lander touch-down window |
| 12/11 | 16:02:20 | 17:02:20 | EXPECTED LANDING and receipt of signal (Forecast; 40 min variability) |
| 12/11 | - | - | Upon landing - start post-touch-down operations
including: * ADS thruster fires for ~15 sec to avoid rebound * Harpoons (X2) fire to secure Lander to surface * Flywheel off |
| 12/11 | 16:07:12 | 17:07:12 | ÇIVA-P panoramic imaging on Lander obtains first images of surface and transmits same (forecast; depends on landing time) |
| 12/11 | 16:07:14 | 17:07:14 | Separation, Descent & Landing (SDL) science observations continue: Ptolemy & COSAC begin science gathering; data collected during descent and initial surface observations will be uploaded |
| 12/11 | 16:39:39 | 17:39:39 | Lander completes SDL operations; upload of science data |
| 12/11 | 17:49:07 | 18:49:07 | Lander begins First Science Sequence (FSS) Block 1; runs about 7 hours |
| 12/11 | 19:00:00 | 20:00:00 | EOT DSN Madrid |
| 12/11 | 19:03:00 | 20:03:00 | End of Lander/Orbiter first communication window |
| 13/11 | 01:43:00 | 02:43:00 | BOT ESA NNO |
| 13/11 | 02:59:00 | 03:59:00 | EOT ESA MLG |
back Abbreviations
| BOT | Begin of track | |||
| EOT | End of track | |||
| NNO | ESA - ESTRACK 35m New Norcia tracking station, Australia | |||
| MLG | ESA - ESTRACK 35m Malargüe tracking station, Argentina | |||
| LDR | Philae Lander | |||
| ROS | Rosetta Orbiter | |||
| LCC | Lander Control Centre, DLR/Cologne | |||
| ESOC | Rosetta Control Centre, ESA/Darmstadt | |||
| ROLIS | Rosetta Lander Imaging System (ROLIS): CCD imager designed to return images of the landing site before and after Philae has landed | |||
| ADS | Active Descent System (ADS) - this system emits cold gas thrust at touchdown to avoid rebound. | |||
| BOT | Indicates when station is pointing & ready. Actual acquisition of signal may come only afterwards | |||
| DSS 25 | NASA - DSN 34m Goldstone tracking station, California, USA | |||
| DSS 45 | NASA - DSN 34m Canberra tracking station, Australia | |||
| DSS 55 | NASA - DSN 34m Madrid tracking station, Spain | |||
| DSS 54 | NASA - DSN 34m Madrid tracking station, Spain | |||
| MVR | Manoeuvre - a thruster burn to change direction and/or speed | |||
| MSS | (Mechanical Support System) is the lander side of Philae which executes the mechanical separation from the orbiter. | |||
| ESS | ESS (Electrical Support System) is the orbiter part of the lander. The ESS controls the orbiter communication interface with the lander. ESS itself operates as usual as power and data interface to the Orbiter. | |||

{kind=link}
{kind=link}