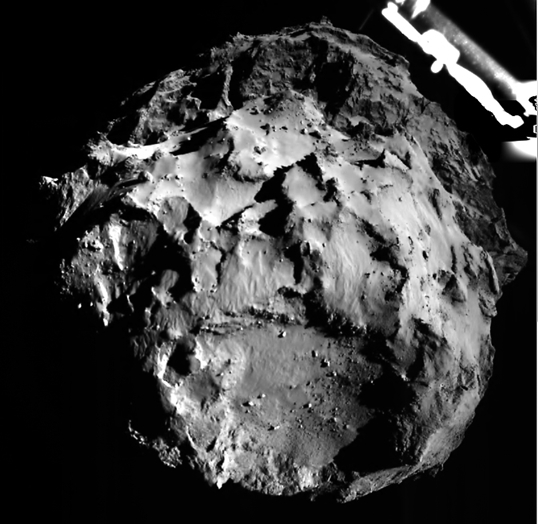
| cliquez vers une vue plus grande des images (gif animé) prises du lander par le vaisseau Rosetta alors qu'il se sépare de celui-ci. ESA |
La date de l'atterrissage devait être confirmée le 26 septembre une fois une analyse de trajectoire complémentaire menée et le Go/No Go pour l'atterrissage sur le site choisi devait suivre une "comprehensive readiness review" ("passage en revue complet de l'état de préparation") le 14 octore. Les opérations d'atterrissage ont commencé à partir du 11/11/3=2014. Après d'une série de décisions Go/No Go aient été prises, la sonde Rosetta a finalement été déplacée jusqu'à un point surplombant la comète de 22,5km et la séparation a été confirmée au Space Operation Centre de l'ESA, l'ESOC, à Darmstadit, en Allemagne, à 9h 03 GMT. Les signaux de la sonde mettaient alors 28 minutes et 20 secondes pour atteindre la Terre. De là, le lander Philae s'est contenté de descendre sans propulsion ni guidage, prenant, pendant 7 heures, graduellement de la vitesse sous l'influence du faible champ gravitationnel de la comète pour finalement atteindre une vitesse d'1m/s (3,5 km/h). Des commandes préparées par le Lander Control Center de l'agence spatiale allemande, le DLR, avaient été téléchargées par le centre de contrôle de mission du vaisseau Rosetta avant la séparation. Le lander, pendant la descente, devait prendre des images et faire des observations scientifiques et il devait reprendre un contact radio avec Rosetta 2 heures après la séparation. Tout cela s'est passé à 500 million de kilomètres de la Terre. Le 14 novembre, le site d'atterrisage "J" avait été renommé "Agilkia Island", du nom d'une île sur le Nil, là où le temple d'Isis de l'île de Philae avait été déplacé suite à la construction du barrage d'Assouan
Des problèmes, cependant, ont handicapé l'atterrissage du lander: d'abord le thruster se trouvant au sommet du lander semblait ne pas fonctionner et l'atterrissage devait donc se fonder sur les harpons seulement. Mais ces harpons, à leur tour, n'ont pas fonctionné au moment de l'atterrissage. La conséquence en a été que le lander a rebondi d'1km (bien que l'atterrissage se soit effectué à une vitesse très faible; ceci du fait de la faible gravité de la comète, le lander ne pesant qu'1 gramme, au lieu de 100kg, sur la comète); ensuite que le lander a atterri sur un terrain incliné, près d'un rocher et dans une zone ombrée. Aussi, après son atterrissage, le lander Philae n'est ancré à la comète que par deux de ses trois vis d'ancrage. Avec une inclinaison de 13° et 1h 30 d'insolation au lieu de 12, les opérations scientifiques du rover sont pénalisées mais elles n'en continuent pas moins. Le "Science, Operations and Navigation Centre" du lander Philae se trouve au CNES, l'agence française et le "Lander Control Center", lui, est au DLR, l'agence spatiale allemande
| cliquez vers une vue de la surface de la comète se rapprochant vue par l'instrument ROLIS du lander Philae. ESA |
| cliquez vers l'assemblage de deux images montrant le lieu de l'atterrissage; l'un des pieds du lander se voit à l'avant-plan. ESA |
La confirmation de l'atterrissage du lander avait été reçue sur Terre à 16h 03 GMT le 12 novembre 2014. Un premier signal avait eu lieu mais le lander avait rebondi plus loin que l'ellipse d'atterrissage prévue. Puis Philae atterrit de nouveau deux heures plus tard et, enfin, ce fut le troisième contact qui fut le bon. Mais cet atterrissage définitif plaçait le lander dans une crevasse de 2m (6 ft) de diamètre sur 2m (6ft) de fond et il se trouvait sur son côté. Malgré sa position sur son site d'atterrissage, le lander Philae a pu accomplir, sur ses propres batteries, sa mission scientifique de base telle que prévue -dont un sondage dans le sol- en 57 heures passées sur la comète 67P/Churyumov–Gerasimenko. Le lander a détecté des molécules organiques dans l'atmosphère de la comète 67P/Churyumov-Gerasimenko. Les ingénieurs de vol avaient pu réhausser le lander de 4cm et le faire pivoter de 35° dans l'espoir d'obtenir plus d'énergie solaire mais la puissance disponible ne s'en est pas moins rapidement épuisée. Les images prises pendant la descente montre une surface couverte de poussière et de débris dont les tailles vont du millimètre au mètre et les images panoramiques d'après l'atterrissage montrent des murs de matériau plus dur disposé en couches. Comme la puissance solaire disponible au site est insuffisante pour alimenter le lander, l'équipe de Philae a décidé de placer le lander en hibernation; ils espèrent pouvoir le réveiller lorsque la comète se sera rapprochée du Soleil. L'orbiter Rosetta cherchera un signal du lander chaque fois que son orbite la placera en ligne avec ce dernier mais on ne pense pas qu'un contact puisse être rétabli dans un futur proche. L'atterrisseur a pu être réveillé le 26 avril 2015, mais n'a pu envoyer de signaux que le 13 juin. Après le 13 juin, il a réalisé sept autres contacts intermittents avec Rosetta dans les semaines suivantes, le dernier ayant eu lieu le 9 juillet. Le réveil du lander a été dû à ce que la comète s'est approchée du Soleil, donnant plus de puissance aux panneaux solaires. Toutefois, ces communication ont été trop courtes et instables pour permettre qu'on ordonnât des mesures scientifiques au lander. Philae a cependant réussi 80% de sa première séquence scientifique prévue avant de passer en hibernation. La mission de Philae a été considérée terminée par l'ESA à la fin de décembre 2015
(chronologie donnée par l'ESA (texte original en anglais); tous les horaires sont sujets à changement. voir plus bas les abréviations)
| Date |
UTC sur Terre |
CET sur Terre |
Evènement |
| 11/11 | 01:48:49 | 02:48:49 | BOT station de l'ESA de Nouvelle-Norcie (NNO) |
| 11/11 | 03:10:00 | 04:10:00 | BOT de l'antenne NASA DSN de Canberra |
| 11/11 | 12:25:00 | 13:25:00 | EOT station de Canberra |
| 11/11 | 13:40:00 | 14:40:00 | BOT de l'antenne NASA DSN de Madrid |
| 11/11 | 13:58:05 | 14:58:05 | BOT de la station ESA de Malargüe (MLG) |
| 11/11 | 14:00:00 | 15:00:00 | la Flight Dynamics Team, à l'ESOC commence la procédure de détermination de l'orbite pour fixer précisément la trajectoire du vaisseau Rosetta |
| 11/11 | 14:30:17 | 15:30:17 | EOT station ESA NNO |
| 11/11 | 18:33:20 | 19:33:20 | le lander s'allume (dont l'allumage du système de support électrique, qui contrôle l'interface de communications de Rosetta avec le lander) |
| 11/11 | 19:05:20 | 20:05:20 | chauffage des batteries et du lander même le réservoir ADS ("Active Descent System") s'ouvre (il alimente le thruster à gaz froid qui poussera vers le haut au moment de l'atterrissage pour éviter un rebond |
| 11/11 | 19:25:20 | 20:25:20 | le conditionnement de la batterie primaire du lander commence (28mn) |
| 11/11 | 19:00:00 | 20:00:00 | EOT antenne NASA DSN Madrid |
| 11/11 | 19:30:00 | 20:30:00 | GO/NOGO 1 dernière détermination complète de l'orbite. Le Flight Dynamics de l'ESOC confirme que la trajectoire de Rosetta est correcte |
| 11/11 | 20:03:00 | 21:03:00 | Rosetta commence à manoeuvrer pour atteindre l'attitude de manoeuvre de pré-largage (on prévoit une perte de signal) |
| 11/11 | 20:20:00 | 21:20:00 | BOT de l'antenne NASA DSN de Goldstone |
| 11/11 | 20:43:00 | 21:43:00 | fin de la transition altitude |
| 11/11 | 20:52:20 | 21:52:20 | mise en route de la roue flywheel du lander (roue de stabilisation qui fournira la stabilité pendant la descente) |
| 11/11 | 23:25:00 | 00:25:00 | BOT de l'antenne NASA DSN de Goldstone |
| 11/11 | 23:40:00 | 00:40:00 | BOT de l'antenne NASA DSN de Canberra |
| 12/11 | 00:00:00 | 01:00:00 | EOT antenne NASA DSN Goldstone |
| 12/11 | 00:00:00 | 01:00:00 | GO/NOGO 2(a) confirmation que les télécommandes pour contrôler la séquence de largage sont prêtes GO/NOGO 2(b) l'ESOC confirme que le vaisseau Rosetta est prêt |
| 12/11 | 01:00:00 | 02:00:00 | l'ESOC télécharge les commandes pour contrôler les opérations de largage du lander par le vaisseau |
| 12/11 | 01:03:20 | 02:03:20 | le lander produit une dernière télémétrie (TM) embarquée avant la décision GO/NOGO de séparation |
| 12/11 | 01:35:00 | 02:35:00 | (PREVU POUR 02:35 UTC / 03:35 CET) GO/NOGO 3 - confirmation que le lander Philae est prêt pour l'atterrissage |
| 12/11 | 01:46:10 | 02:46:10 | BOT de la station ESA Nouvelle-Norcie |
| 12/11 | 03:02:50 | 04:02:50 | EOT station ESA Malargüe |
| 12/11 | 04:03:20 | 05:03:20 | lander: début des opérations de séparation, descente & atterrissage (SDL) début de l'allumage des instruments du lander (d'abord le ROMAP) |
| 12/11 | 04:28:20 | 05:28:20 | Rosetta: début de l'exécution des commandes embarquées pour les opérations de largage |
| 12/11 | 04:34:20 | 05:34:20 | les batteries du lander commencent d'être portées à la température de séparation |
| 12/11 | 06:03:20 | 07:03:20 | Rosetta: tout débuts de la manoeuvre de pré-largage (allumage thruster) l'allumage sera suivant d'une perte de signal du fait de la manoeuvre corrélative en vue de la séparation la manoeuvre doit durer apporter un changement de vitesse de 0.46m/s & durer 6mn |
| Date |
UTC sur Terre |
CET sur Terre |
Evènement | 12/11 | 06:35:00 | 07:35:00 | début du GO/NOGO 4 (décision finale d'autoriser l'atterrissage) |
| 12/11 | 07:03:20 | 08:03:20 | Rosetta: fin des débuts de la maoeuvre de pré-largage |
| 12/11 | 07:35:00 | 08:35:00 | fin du GO/NOGO 4 (décision finale d'autoriser l'atterrissage) |
| - | - | à la suite de la manoeuvre thruster (MVR), la Flight Dynamics Team de l'ESOC Flight Dynamics Team effectue une évaluation rapide de la performance de celle-ci pour vérifier les résultats de l'allumage thruster | |
| 12/11 | 07:49:20 | 08:49:20 | Lander: allumage MUPUS |
| 12/11 | 07:52:20 | 08:52:20 | début du fonctionnement du MUPUS et allumage du CivaRolis ÇIVA and ROLIS sont des systèmes imageurs (le ÇIVA prend des vues panoramiques et le ROLIS prend des vues vers le bas) |
| 12/11 | 07:55:20 | 08:55:20 | début du fonctionnement du CivaRolis et allumage SESAME (capteur de poussière) |
| 12/11 | 08:04:20 | 09:04:20 | début du fonctionnement du SESAME |
| 12/11 | 08:46:20 | 09:46:20 | allumage du MSS (Mechanical Support System, "système de support mécanique"), qui opère la séparation mécanique du lander du vaisseau Rosetta |
| 12/11 | 08:46:20 | 09:46:20 | allumage des moteurs de séparation |
| 12/11 | 08:49:20 | 09:49:20 | début des opérations CONSERT du vaisseau Rosetta |
| 12/11 | 08:50:20 | 09:50:20 | début des opérations CONSERT du lander |
| 12/11 | 08:51:20 | 09:51:20 | début de la séquence MSS (auto-séquence interne pour la préparation à l'atterrissage) |
| 12/11 | 08:53:20 | 09:53:20 | le lander fonctionne maintenant sur la puissance de sa batterie interne |
| 12/11 | - | - | les vis des moteurs de séparation [ndt: ?] commencent d'entrer en rotation et de fournir une vitesse de déploiement qui va éloigner le lander (vitesse rétrograde; 0,21 m/s) |
| 12/11 | 09:03:20 | 10:03:20 | SEPARATION PHILAE (heure prévue; fenêtre de 94 secondes) confirmation de la séparation reçue au sol via la station ESA NNO de Nouvelle-Norcie station |
| 12/11 | 09:04:12 | 10:04:12 | le lander (par ÇIVA) prend les premières images de l'orbiter Rosetta (FAREWELL1) |
| 12/11 | 09:06:17 | 10:06:17 | le lander (ÇIVA) prend les images suivantes de l'orbiter (FAREWELL2) |
| 12/11 | 09:12:17 | 10:12:17 | la distance de séparation lander/orbiter est maintenant de 100m début de l'auto-déploiement du train d'atterrissage et de l'antenne boom du ROMAP |
| 12/11 | 09:25:50 | 10:25:50 | le lander commence une rotation de 14° pour obtenir une orientation stable d'atterrissage |
| 12/11 | 09:43:20 | 10:43:20 | Rosetta réalise une manoeuvre post-largage l'allumage sera suivi d'une perte de signal due au fait que le vaisseau reviendra corrélativement à son pointage nominal (l'ampleur de la manoeuvre sera déterminée le 12/11) |
| 12/11 | 09:47:17 | 10:47:17 | le lander termine toutes les activités post-séparation |
| 12/11 | 10:53:20 | 11:53:20 | acquisition du signal ("acquisition of signal", AOS) de Rosetta AOS prévu; le lien avec Rosetta est ré-établi |
| 12/11 | 11:59:20 | 12:59:20 | début de la transmission vers la Terre des données stockées par Rosetta & Philae |
| 12/11 | 12:20:00 | 13:20:00 | EOT antenne NASA DSN Canberra |
| 12/11 | 13:15:00 | 14:15:00 | BOT de l'antenne NASA DSN de Madrid |
| 12/11 | 13:55:00 | 14:55:00 | BOT station de l'ESA MLG |
| 12/11 | 14:27:00 | 15:27:00 | EOT station NNO |
| 12/11 | 14:58:57 | 15:58:57 | le lander allume le système ancrage & CivaRolis |
| Date |
UTC sur Terre |
CET sur Terre |
Evènement | 12/11 | 15:01:57 | 16:01:57 | Lander: début des prises de vue du site d'atterrissage et allumage ADS (Active Descent System) |
| 12/11 | 15:07:02 | 16:07:02 | le ROLIS commence les prises de vue |
| 12/11 | 15:17:15 | 16:17:15 | les systèmes embarqués du lander accomplissent les opérations pré-atterrissage finales |
| 12/11 | 15:22:20 | 16:22:20 | début de la fenêtre d'atterrissage |
| 12/11 | 16:02:20 | 17:02:20 | ATTERRISSAGE PREVU et réception du signal (prévision; variabilité de 40mn) |
| 12/11 | - | - | à l'atterrissage: début des opérations post-atterrissage, dont: * mise à feu du thruster ADS pendant 15 secondes pour éviter un rebond * les harpons (X2) sont mis à feu pour sécuriser le lander sur la surface * extinction de la roue flywheel |
| 12/11 | 16:07:12 | 17:07:12 | allumage du système de prise de vue panoramique ÇIVA-P le lander prend les premières images de la surface et les transmet (prévision; dépend de l'heure de l'atterrissage) |
| 12/11 | 16:07:14 | 17:07:14 | les opérations scientifiques "Separation, Descent & Landing" (SDL) continuent: Ptolemy & COSAC commencent leur collecte; les données recueillies pendant la descente et les premières observations de la surface seront transmis au vaisseau Rosetta |
| 12/11 | 16:39:39 | 17:39:39 | le lander termine les opérations SDL; transmissons des données scientifiques |
| 12/11 | 17:49:07 | 18:49:07 | le lander commence la "First Science Sequence" ("première séquence scientifique", FSS), Block 1; elle dure 7 heures |
| 12/11 | 19:00:00 | 20:00:00 | EOT antenne NASA DSN Madrid |
| 12/11 | 19:03:00 | 20:03:00 | fin de la première fenêtre de communications lander/orbiter |
| 13/11 | 01:43:00 | 02:43:00 | BOT station ESA NNO |
| 13/11 | 02:59:00 | 03:59:00 | EOT station ESA MLG |
back Abréviations
| BOT | Begin of track; début du suivi | |||
| EOT | End of track; fin du suivi | |||
| NNO | ESA - ESTRACK 35m Nouvelle-Norcie tracking station, Australia; station ESTRACK de 35m de l'ESA de Nouvelle-Norcie, Australie | |||
| MLG | ESA - ESTRACK 35m Malargüe tracking station, Argentina; station ESTRACK de 35m de l'ESA de Malargüe, Argentine | |||
| LDR | Philae Lander; lander Philae | |||
| ROS | Rosetta Orbiter: orbiter Rosetta | |||
| LCC | Lander Control Centre, DLR/Cologne; Lander Control Centre (centre de contrôle du lander) de l'agence spatiale allemande (DLR), Cologne | |||
| ESOC | Rosetta Control Centre, ESA/Darmstadt; centre de contrôle de l'orbiter Rosetta, ESA, Darmstadt | |||
| ROLIS | Rosetta Lander Imaging System (ROLIS) (imageur CCD qui prendra des images du site d'atterrissage avant et après l'atterrissage) | |||
| ADS | Active Descent System (ADS) (ce système mettra à feu un thruster à gaz froid à l'atterrissage pour éviter un rebond) | |||
| BOT | indique quand une station est pointée et prête; l'acquisition du signal peut n'avoir lieu qu'ensuite | |||
| DSS 25 | NASA - DSN 34m Goldstone tracking station, California, USA; antenne NASA DSN de 34m de Goldstone, Californie, Etats-Unis | |||
| DSS 45 | NASA - DSN 34m Canberra tracking station, Australia; antenne NASA DSN de 34m de Canberra, Australie | |||
| DSS 55 | NASA - DSN 34m Madrid tracking station, Spain; antenne NASA DSN de 34m de Madrid, Espagne | |||
| DSS 54 | NASA - DSN 34m Madrid tracking station, Spain; antenne NASA DSN de 34m de Madrid, Espagne | |||
| MVR | manoeuvre (une mise à feu de thruster pour modifier la direction et/ou la vitesse) | |||
| MSS | Mechanical Support System (le côté du lander qui exécute la séparation mécanique d'avec le vaisseau Rosetta) | |||
| ESS | ESS (Electrical Support System); partie du lander qui se trouve sur l'orbiter; l'ESS contrôle l'interface de communication de l'orbiter avec le lander; l'ESS opère comme l'interface usuelle d'alimentation et de données à destination de l'orbiter | |||

{kind=link}
{kind=link}