Le rover Curiosity a exécuté un atterrissage parfait, dans les temps, le lundi 6 août 2012 à 6h 31 GMT. Le site d'atterrissage a été baptisé "Bradbury Landing" d'après le célèbre romancier de science-fiction américain, auteur des "Chroniques martiennes". Un nouveau logiciel a été installé entre le 10 et le 13 août ce qui permet au rover de passer des opérations d'atterrissage aux opérations scientifiques. Il a ainsi commencé de s'éloigner du site d'atterrissage. Il va, maintenant, passer quelques jours supplémentaires à travailler à proximité, effectuant des vérifications et des calibrations de ses instruments et étudiant les environs; il prendra ensuite la destination de sa première vraie destination, qui est située 400 mètres à l'Est-sud-est. Les premières analyses du terrain à proximité immédiate du site d'atterrissage montrent qu'il s'agit d'un terrain basaltique.
L'atterrissage du rover Curiosity a eu lieu à 15h heure locale de Mars et la distance entre la Terre et Mars était de 567 millions de km (352 millions de miles); la température variait entre -90 et 0°C (-130 à 32°F). Du fait de l'emploi d'une nouvelle technique d'atterrissage, les ingénieurs de vol ont pu réduire l'ellipse d'atterrissage à 7x20km (12x16 miles) -à l'origine 20x25km (12x16 miles)- et à rapprocher le centre de la cible du mont Sharp. L'ellipse originelle était déjà plus petite que les ellipses utilisées pour les missions martiennes précédentes. La précision de l'atterrissage a également été permise par des données d'altitude provenant de la High Resolution Stereo Camera de l'orbiter européen de l'ESA, le Mars Express, des images de la Context Camera de l'orbiter de la NASA, le Mars Reconnaissance Orbiter et des informations couleur venant des données des orbiters des vieilles missions Viking. Tout cela a permis un atterrissage dans une zone de terrain plus plat, se trouvant entre le mont central et la muraille du cratère Gale. La mission venait d'accomplir un voyage de 36 semaines depuis la Terre et elle avait subi 5 flares solaires majeurs au long de son trajet. Une autre première de la mission a été qu'une caméra située sur l'ensemble de descente a pu filmer la descente spectaculaire jusqu'à la surface depuis le moment où il a largué son bouclier thermique inférieur; de plus, l'un des orbiters de la NASA actuellement en mission autour de Mars a pu imager la mission en train de descendre suspendue à son parachute. Cette vidéo et cette image ont pu ainsi rendre la sensation -encore jamais atteinte par aucune mission martienne- de comment une mission planétaire atterrit sur une une autre planète voire de comment l'atterrissage d'une future mission martienne habitée atterrira. Un ensemble de capteurs dit "MSL Entry Descent and Landing Instrumentation" ("instrumentation d'entrée, descente et atterrissage du Mars Science Laboratory", ou MEDLI), incorporé dans le bouclier thermique, devait également collecter des données importantes pendant la descente
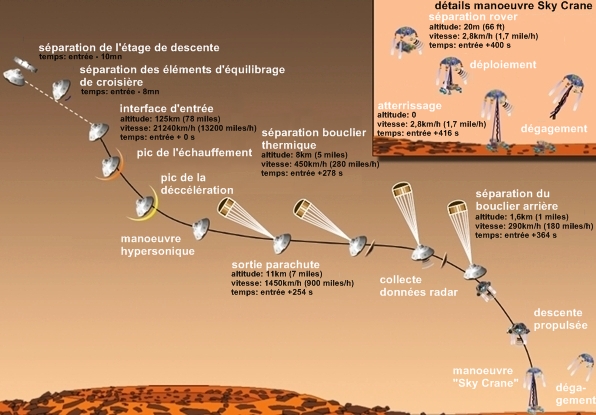
| séquence de la descente du Mars Science Laboratory (les données temps sur ce diagramme ont été déterminées par les conditions atmosphériques martiennes réelles du jour de la descente). site 'Amateur Astronomy' |
Pendant les phases de croisière et d'approche, le vaisseau était stabilisé par rotation à 2 tours/mn. La phase d'approche a consisté en les 45 derniers jours de la trajectoire. Lui a succédé la phase EDL ("entry, descent and landing", "entrée, descente, atterrissage") qui a commencé quand la mission a atteint le sommet de l'atmosphère martienne -à une vitesse de 21200km/h (13200 miles/h). La phase EDL devait se terminer 7 minutes plus tard avec l'atterrissage du rover sur la surface de Mars. Entre juste avant le largage de l'étage de croisière, 10 minutes avant l'entrée dans l'atmosphère, au sectionnement du câble de descente entre la grue et le rover, la mission est passée par 6 configurations différentes et a vu l'explosion de 76 systèmes pyrotechniques (qui ont servi à séparer ou déployer des éléments). Le point d'interface d'entrée dans l'atmosphère (en anglais le "atmospheric entry interface point"), l'endroit visé par les ingénieurs de vol, avait été fixé à 131,1km (81,46 miles) au-dessus de l'altitude du site d'atterrissage dans le cratère Gale. Durant sa descente vers le site, le vaisseau s'est déplacé vers l'Est, parcourant une distance-sol de 630km (390 miles) entre le point d'entrée dans l'atmosphère et la zone d'atterrissage préue. 10 minutes avant l'entrée dans l'atmosphère martienne, la mission a largué son étage de croisière. L'ensemble d'instruments dits "Mars Science Laboratory Entry, Descent and Landing Instrument" ("instruments d'entrée, descente et atterrissage du Mars Science Laboratory", MEDLI) a commencé de collecter des données. 1 minute après la séparation de l'étage de croisière et 9 mn avant l'entrée dans l'atmosphère, de petits thrusters situés sur le bouclier arrière ont arrêté la rotation de 2 tours/mn qui était celle du vaisseau pendant les phases de croisière et d'approche. Puis ces thrusters ont orienté le vaisseau de sorte que le bouclier thermique fasse face à l'avant, manoeuvre dite "turn to entry" ("ré-orientation pour l'entrée atmosphérique"). Ensuite, le bouclier thermique arrière a largué deux poids de tungstène dit "éléments d'équilibre de masse pour la croisière" (en anglais "cruise balance mass devices") ce qui a permis de déplacer le centre de gravité du vaisseau de façon que de la portance soit générée. Cette portance avait été prévue de façon de sorte que la mission parcoure une certaine distance dans l'atmosphère puisqu'il fallait faire atterrir un rover de poids plus lourd que les précédents. La mission, de plus, a pu modifier automatiquement cette portance via une technique dite, en anglais, "guided entry" ("entrée guidée"): par de petits thrusters placés sur le bouclier arrière, il pouvait éliminer de potentielles variations non prévues de la densité de l'atmosphère martienne et donc améliorer la précision de l'atterrissage voire exécuter des virages en S (des inversions d'inclinaison -en anglais: "bank reversals". Plus de 9/10ème de la déccélération précédant l'atterrissage ont été exécutés par la friction de l'ensemble de descente avec l'atmosphère martienne. Le pic de chaleur du bouclier a eu lieu aux alentours de 75 secondes après l'entrée (2100°C -3800°F) et la déccélération a atteint entre 10 et 11 G
Ensuite, la mission Curiosity a de nouveau largué des poids de tungstène pour rééquilibrer le vaisseau, cette fois en vue de la phase parachute de la descente. Le parachute -d'un diamètre de 16m (51 pieds) a alors été déployé (254 secondes après l'entrée atmosphérique et à une altitude de 11km (7 miles) et une vitesse de 405m/s (900 miles/h)). 24 secondes après, le bouclier thermique inférieur s'est séparé (altitude: 8km (5 miles), vitesse 125m/s (280 miles/h)). Le "Mars Descent Imager" ("imageur de la descente sur Mars") a alors commencé d'enregistrer la descente en vidéo, jusqu'à l'atterrissage. 85 secondes après le largage du bouclier thermique, le bouclier arrière -qui portait le parachute- s'est lui aussi séparé de l'étage de descente -avec le rover- soit à 1,6km (1 mile) d'altitude et une vitesse de 290 km/h (180 miles/h). Les 8 rétro-fusées à puissance contrôlable -les "Mars landing engines" ("moteurs d'atterrissage sur Mars") se sont allumées, inaugurant la phase de "descente propulsée" (en anglais, "powered descent phase"), déccélérant la descente à seulement 2,7 km/h (1,7 miles/h). 4 de ces rétro-fusées se sont éteintes à peine juste avant que des cordages de nylon commencent -à 20m (66 pieds) au-dessus du sol- de descendre le rover par rapport à l'étage de descente -manoeuvre dite "sky crane" -"grue (de chantier". On était alors à 12 secondes de l'atterrissage. A partir de ce moment, le rover s'était donc séparé de l'étage de descente mais lui restait attaché par les cordages. Juste avant l'atterrissage ce sont alors les roues du rover qui se sont déployées. Le cordage avait alors atteint sa limite maximale et le vaisseau continuait de descendre. L'atterrissage a eu lieu à la vitesse de 2,7 km/h (1,7 miles/h). Lorsque les capteurs du rover ont enregistré l'atterrissage, les cordages ont été sectionnés et l'étage de descente s'est dégagé de la zone d'atterrissage (il s'est écrasé à 300m (1000 pieds) de l'atterrissage. L'ordinateur de bord du rover est alors passé du mode "entrée, descente, atterrissage" à "surface" et il a entamé les activités autonomes prévues pour le premier jour sur Mars
Pour ce qui est des télécommunications pendant cette descente, la transmission des données devaient être handicapées car la Terre allait se coucher derrière l'horizon martien, vu depuis le vaisseau qui descendait, au fur et à mesure de la descente. Aussi, l'orbiter Mars Odyssey, de la NASA, allait participer à mettre en place un système indirect. Le MRO (Mars Reconnaissance Orbiter) de la NASA et l'orbiter européen de l'ESA, le Mars Express se trouvaient également en position de recevoir les communications radio de la mission Curiosity mais, eux, n'allaient que les enregistrer pour les re-transmettre par la suite. Au cours de sa descente, le rover a envoyé deux types différents de données: des tons radios de base, directement à destination de la Terre et des données radio UHF plus complexes (relayées de façon différée par Odyssey pour les signaux UHF et le Mars Reconnaissance Orbiter pour les données)
Website Manager: G. Guichard, site 'Amateur Astronomy,' http://stars5.6te.net. Page Editor: G. Guichard. last edited: 8/28/2011. contact us at ggwebsites@outlook.com