 | cliquer vers l'illustration d'un rover jumeau |
La mission "Mars Exploration Rover (MER)" de la NASA est une mission qui consiste en deux rovers identiques -dits "Twin Rovers" -"rovers jumeaux"- qui ont pour but d'atterrir chacun dans une région de Mars et d'y chercher les traces d'une ancienne présence de l'eau. Les deux rovers, baptisés "Spirit" et "Opportunity", ont fait l'objet d'un lancement chacun. Spirit a été lancé le 10 juin 2003 et Opportunity a été lancé le 6 juillet. 2003 était une "année martienne", c'est-à-dire une année au cours de laquelle Mars est à son opposition (en ligne avec le Soleil et la Terre, du côté de la Terre et au plus près de celle-ci). Une telle configuration écourte les voyages vers Mars et a lieu tous les 26 mois. En route les Twin Rovers ont subi la plus intense tempête solaire jamais enregistrée. Spirit doit atterrir dans un ancien cratère, le cratère Gusev et Opportunity atterrira dans les plaines de Meridiani Planum. Les Twin Rovers ont une mission initiale de 3 mois. Ils peuvent surmonter des obstacles de la taille de "Sojourner", le célèbre petit robot de la mission Pathfinder, et ils peuvent parcourir jusqu'à 100 mètres (100 yards) par jour
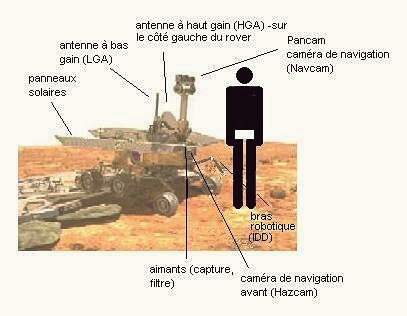
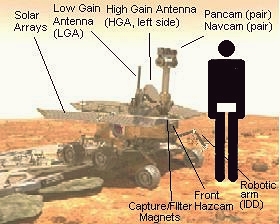
Les deux rovers jumeaux sont équipés d'une panoplie d'instruments variés qui leur permet de mener un travail de géologiste sur la planète rouge. La "Pancam" ("Panoramic Camera"), à hauteur d'homme par rapport au sol permet de déterminer, de loin, la minéralogie, la texture et la structure du terrain. Les "Hazcams" et les "Navcams", dont la fonction première est d'aider à la navigation, peuvent également être utilisées pour prendre des photos de l'environnement. Le "Instrument Deployment Device" (IDD) est un bras robotique dont la tourelle terminale porte 4 instruments: le "Microscope Imager" (MI), qui fournit des images rapprochées des roches et des sols; le "Rock Abrasion Tool" (RAT) qui permet, par abrasion ou perçage, de préparer les roches pour un examen par les autres instruments; le "Mössbauer Spectrometer" (MB), consacré aux matériaux contenant du fer; le Alpha Particle X-Ray Spectrometer (APXS), enfin, qui permet l'analyse des composants des roches et des sols. On a découvert quelques problèmes dans Mössbauer Spectrometer de Spirit lors de l'inspection pratiquée au cours du vol vers Mars, mais cela ne devrait pas empêcher le rover de travailler. Le "Miniature Thermal Emission Spectrometer" (Mini-TES) est associé au mât de la Pancam et il permet l'identification, de loin, des roches et des sols observés. Des aimants, de plus, seront utilisés pour collecter des particules magnétiques de poussière ou pour collecter ces particules sur les roches et le sol. Les rovers communiqueront avec la Terre soit directement, soit par le relai des deux orbiters que la NASA possède actuellement autour de Mars -Mars Global Surveyor et Mars Odyssey. Dans les deux cas, les données seront reçues par les antennes du Deep Space Network (DSN) de la NASA. Dans le cas d'une communication directe, les rovers utilisent leur antenne à haut-gain ("high-gain antenna"); dans le cas d'une communication relayée, il utilisent leur antenne UHF
L'état physique des deux robots s'est suffisamment maintenu pour que la NASA étende leur mission à plusieurs reprises. La dernière extension -la 5ème- a eu lieu en 2007 et autorise les rovers à continuer de travailler possiblement jusqu'en 2009. Les rovers, à intervalle régulier, reçoivent des mises à jour de leur logiciel de vol -ce qui permet d'améliorer leurs performances. Ainsi, constatant la longévité d'Opportunity, la NASA a mis à jour le rover, en mars 2010, via un logiciel qui améliorera ses possibilités d'autonomie dans le domaine scientifique: l'ordinateur de bord peut désormais examiner les images prises par la caméra de navigation grand angle et y déterminer les rochers qui correspondent à certains critères comme la forme ou la couleur. Le rover peut alors centrer la caméra panoramique -à champ plus étroit- sur l'objet considéré et en prendre, par exemple, des images à travers différents filtres. Ce système est dit AEGIS (abbréviation de "Autonomous Exploration for Gathering Increased Science", "exploration autonome pour une augmentation des performances scientifiques"). Jusqu'alors, ç'avaient été les opérateurs au sol des rovers qui, après réception de photos d'un champ, déterminait les cibles à examiner. Des mises à jour antérieures avaient déjà permis aux deux rovers de choisir eux-mêmes leur route au milieu des obstacles du terrain, calculer à quelle distance ils devaient étendre leur bras robotique pour atteindre une roche ou d'examiner des images du ciel, de déterminer lesquelles montrent des nuages ou des tourbillons de poussière puis de transmettre leurs images. Le logiciel AEGIS permet aux scientifiques de modifier les critères que le rover utilisera pour choisir ses cibles: dans certains environnements, on demandera telle forme et telle couleur, etc. Les instruments de cartographie géologique des orbiters martiens de la NASA ont été améliorés sur les dernières missions, telle celle, par exemple, du Martian Reconnaissance Orbiter, chaque pixel représentant désormais 18 m (60 ft) au lieu des 3,2 km (2 miles) qui étaient précédemment atteints. De plus, la technique de superposition des pixels ("pixel-overlap") ajoute encore à cette résolution nouvelle. Aussi, pendant, ces phases d'extension des Twin Rovers, les détections minéralogiques depuis l'orbite servent de plus en plus à étayer les décisions de route des rovers. L'orbiter Mars Global Surveyor avait détecté qu'une vaste région martienne, de la taille d'un état américain, renfermait un type d'hématite et ce fut cette découverte qui détermina le site d'atterrissage du rover Opportunity
. Le site d'atterrissage
. Un résumé des opérations
Quelques pages spécialisées: De l'eau sur Mars? - Les éclipses des satellites de Mars - Innovations informatiques - Les communications avec les rovers pendant une conjonction
. Le site d'atterrissage
. Un résumé des opérations
Quelques pages spécialisées: De l'eau sur Mars? - Les éclipses des satellites de Mars - Innovations informatiques - Les communications avec les rovers pendant une conjonction
Website Manager: G. Guichard, site 'Amateur Astronomy,' http://stars5.6te.net. Page Editor: G. Guichard. last edited: 11/3/2019. contact us at ggwebsites@outlook.com
{kind=link}